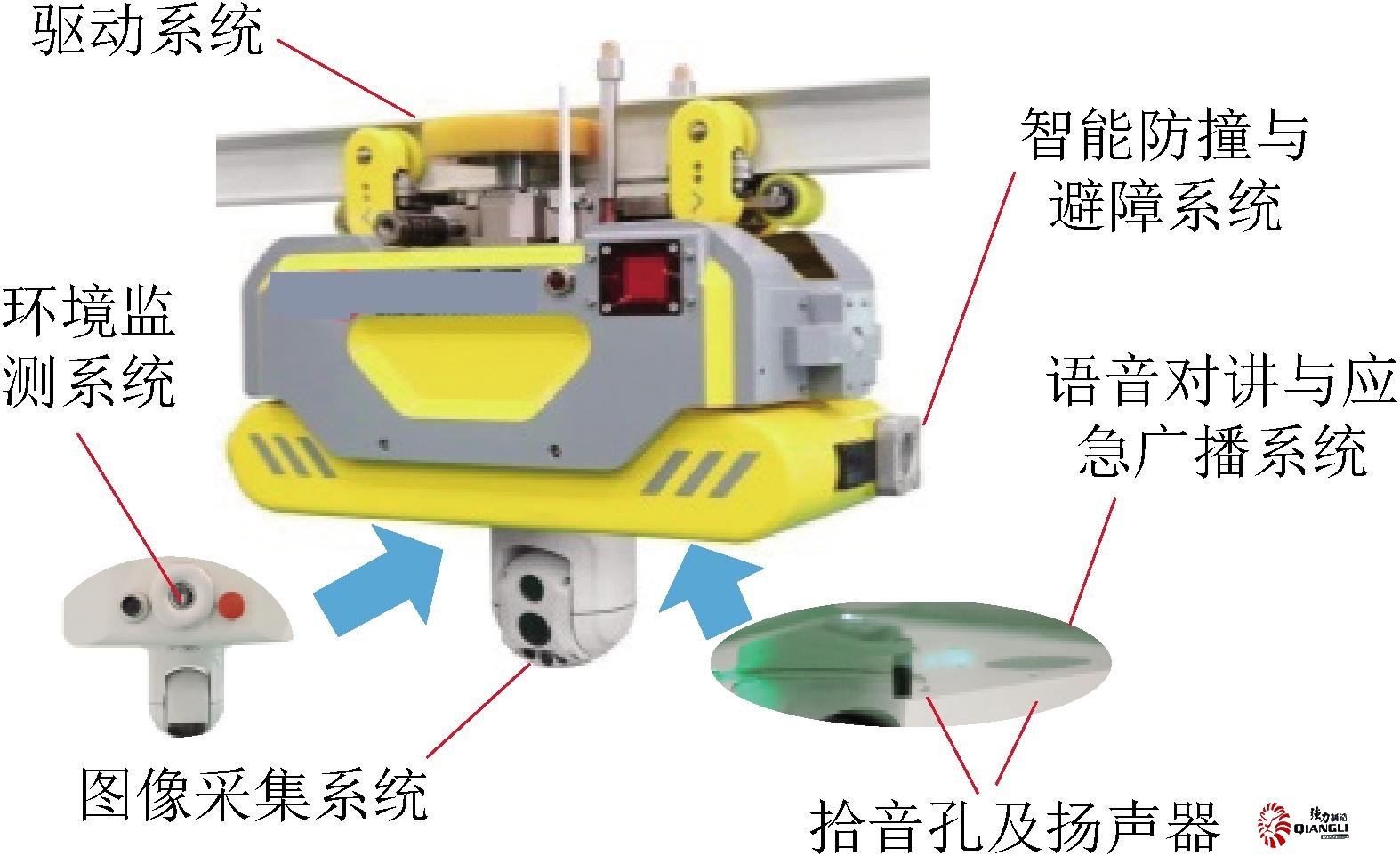
煤礦井下使用的“巡檢智能機器系統”,其主要分為兩部分一部分為“機器人部分”,另一部分為“遠程操控系統”。

機器人部分采用導軌加鋼絲繩、牽引組合形成驅動,搭載多臺高清攝像儀、紅外熱像儀、避障傳感器、多參數氣體測定儀、煙霧傳感器、全面檢測分析皮帶機的運行參數。
操作人員通過遠程操控就可以監視皮帶機運行狀況,智能的地面遠程控制及分析系統,將巡檢機器人的保護信息、皮帶保護設備震動檢測系統進行集成。
實現數據信息共享,可以有效識別出機尾落煤點出現的大矸石或錨桿等異物,對預防皮帶撕裂事故有重要作用。

通過運行巡檢機器人代替了人工巡檢,減輕了現場人員勞動強度降低安全風險,提高了礦井安全自動化管理水平,每年可節省人工費數十萬余元。










 當前位置:
當前位置:
 地址:山西省運城市臨猗縣華晉大道1589號
地址:山西省運城市臨猗縣華晉大道1589號 手機:13935997866
手機:13935997866 電話:13935997866
電話:13935997866